
How to show the same - Rviz config
Rviz allow to subscribe and show ROS topics. It is the simplest form of visualization messages like OccupancyGrid or LaserScan. Every time when you use ROS and have running roscore, you can run Rviz with command rosrun rviz rviz.
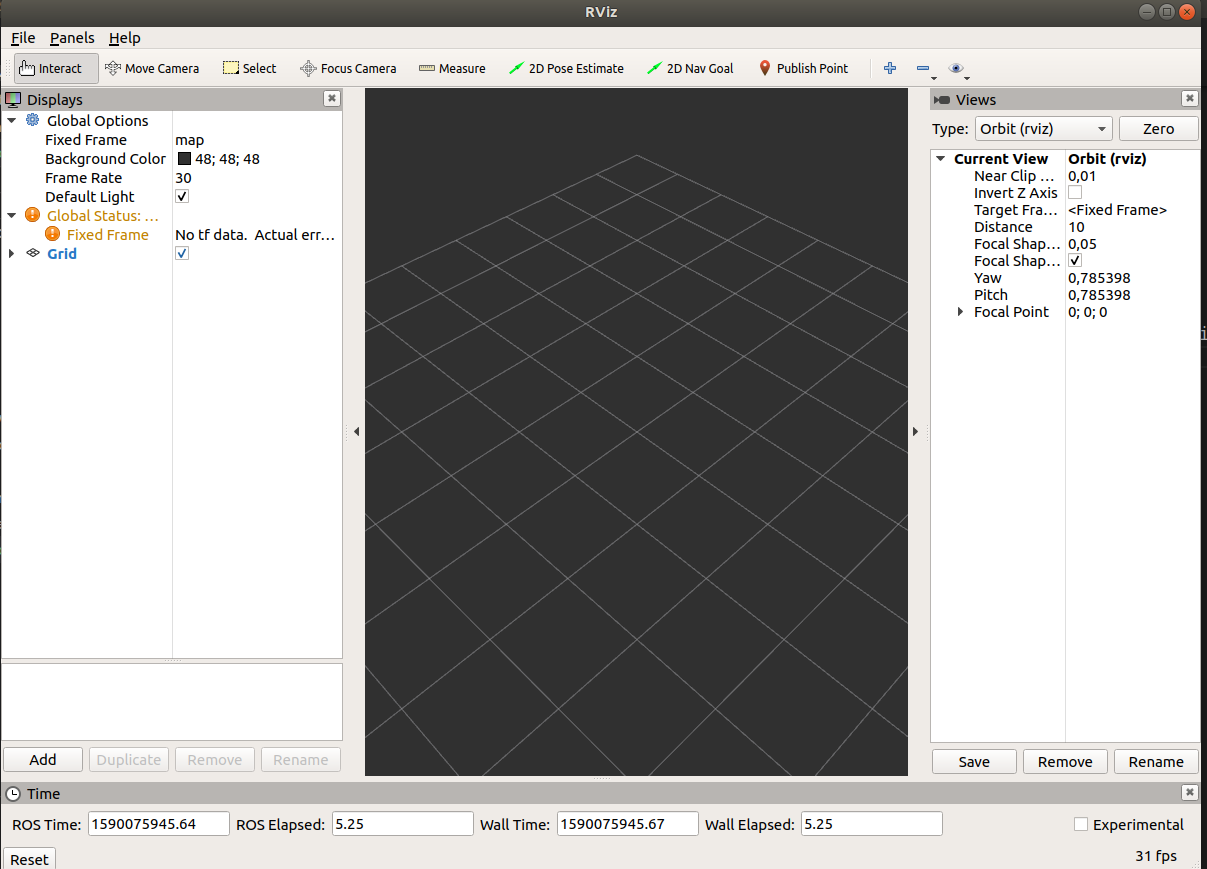
In showed Rviz window you can add topics by add button in left down corner.
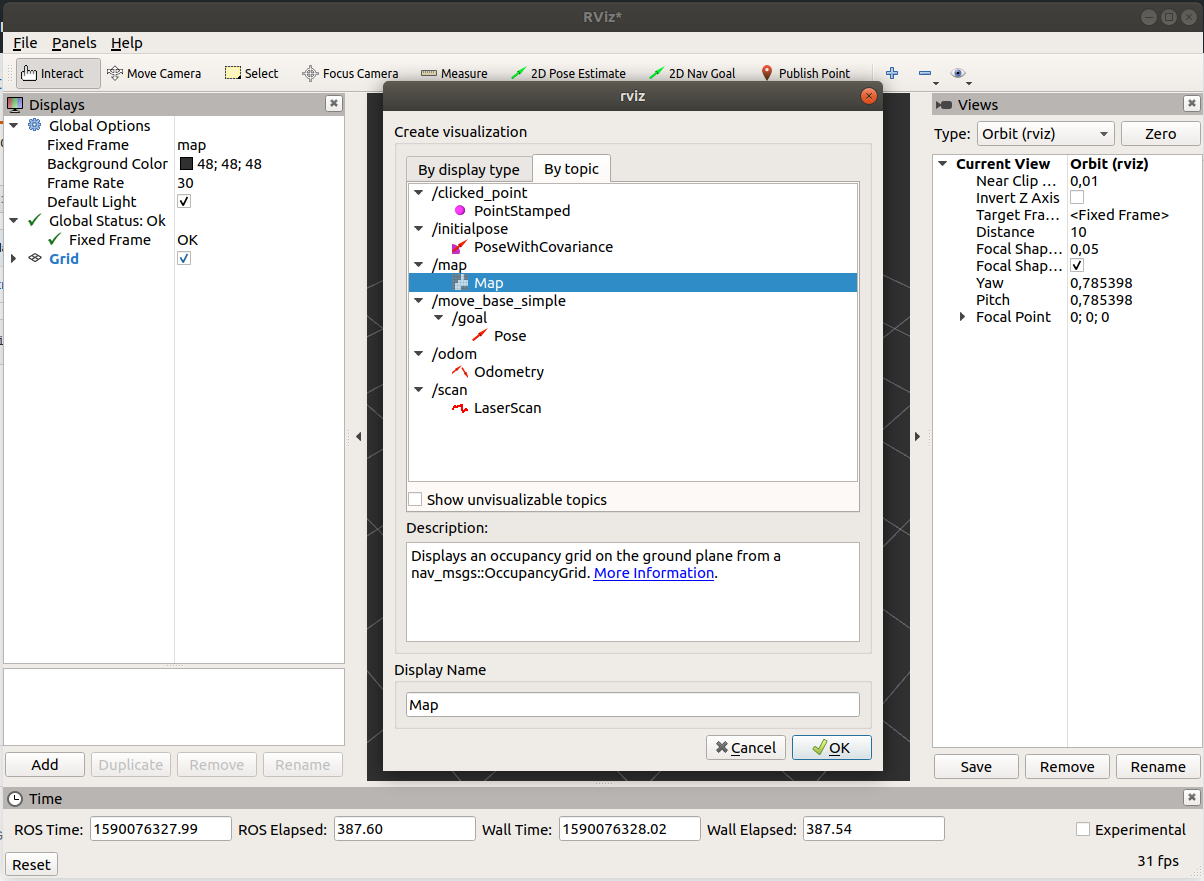
It is very simple, fast and convenient way to visualize and check messages published by topics. Moreover, when you create ROS project and want to use Rviz application as a visualization of project’s processes, you can create Rviz’s node in launch file.
<!-- Launch rviz -->
<node type="rviz" name="rviz" pkg="rviz"/>
Adding this node to launch file let to automatically run Rviz with command:
roslaunch <project_name> <launch_file_name>.launch
However, it only run empty Rviz window, without added subscribed topics. If you want run configured window in Rviz you have to save it settings to <rviz_config_file>.rviz using File -> Save Config As. Project structure with Rviz config file is shown below.
.
├── CMakeLists.txt
├── include
│ └── project_name
| └── <file_1>.hpp
├── launch
│ └── <launch_file_name>.launch
├── package.xml
├── rviz
│ └── <rviz_config_file>.rviz
├── scripts
│ └── <script_file>.py
└── src
└── <file_1>.cpp
After saving application window configuration it is important to indicate this file as an argument for Rviz node in launch file.
<!-- Launch rviz -->
<node type="rviz" name="rviz" pkg="rviz" args="-d $(find <package_name>)/rviz/<rviz_config_file>.rviz" />
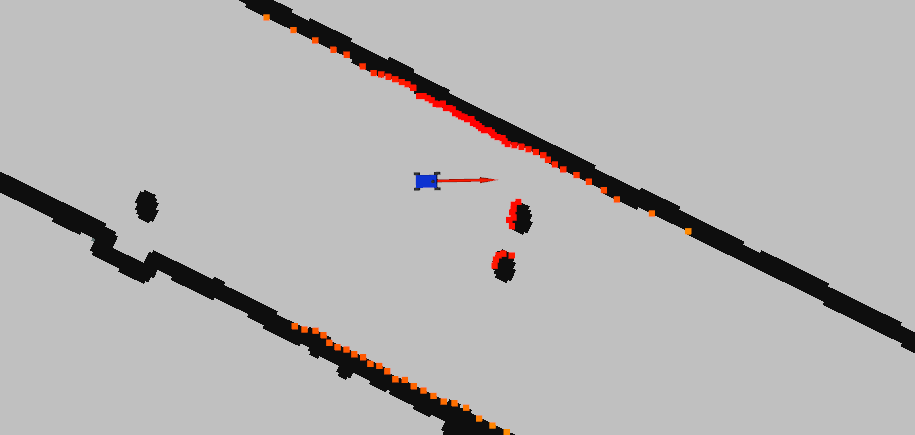
In result, you get the same project visualization as you save in Rviz config file.
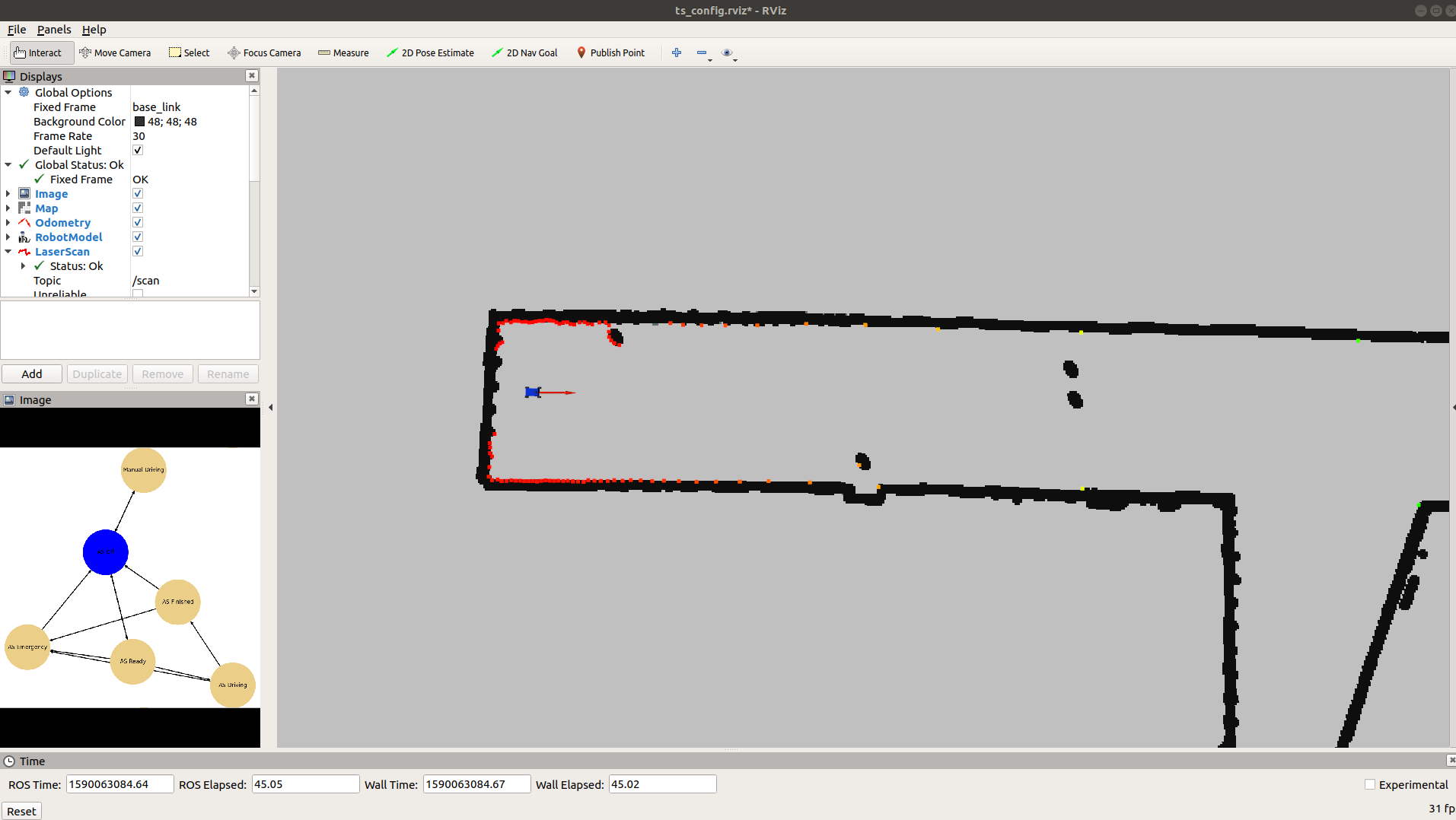
To sum up, Rviz config file lets to get the same application window every time you run roslaunch file. It is very convenient option to show configured ROS project application.
Leave a comment