
Depther project - part 2: calibrate dual camera, parameters rectification
Previous parts
This article shows how to perform dual camera calibration using cv2.calibrateCamera when we have data collected. Next, we discuss how to calibrate cameras with each other using cv2.stereoRectify. This article is rich in links to OpenCV documentation. It is very well written and describes well how algorithms work.
Checkboard corners
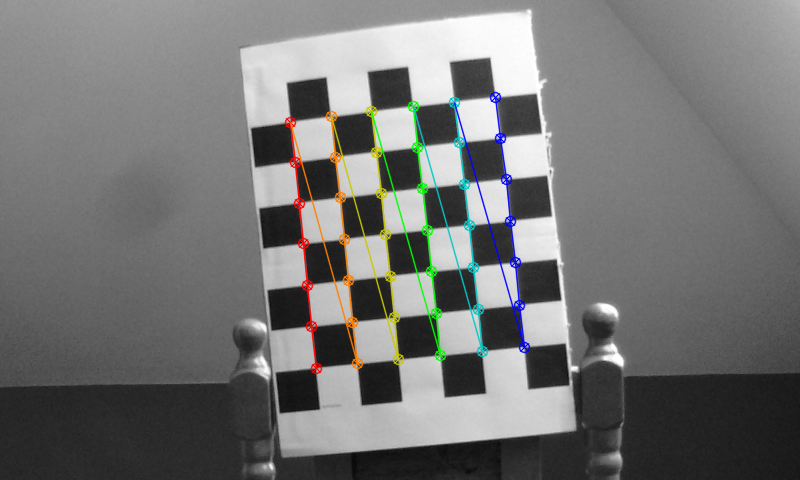
Initially, we need to find the inside corners of the chessboard (cv2.findChessboardCorners). The image should be grayscale.
cb_shape = (7, 6)
corners = cv2.findChessboardCorners(
img, cb_shape, cv2.CALIB_CB_FAST_CHECK)[1]
Next, we will use the cv2.cornerSubPix function, which will allow us to determine the position of corners more precisely. The typical size of winSize, or ‘Half of the side length of the search window’ is (11,11).
criteria = (cv2.TERM_CRITERIA_EPS +
cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
cv2.cornerSubPix(img, corners, (11, 11), (-1, -1), criteria)
If you would like to visualize points (as in the photo in the header), just use the cv2.drawChessboardCorners function and display the image with cv2.imshow or save using cv2.imwrite.
cv2.drawChessboardCorners(img, cb_shape, corners, ret)
Calibrate each camera
Use cv2.calibrateCamera to find the internal parameters of the left and right cameras. In this case, both cameras use the corners of the chessboard visible from the left camera.
The returned values of interest to us are: 3x3 floating-point camera matrix and vector of distortion coefficients.
imageSize = (1280, 720)
matrix_left, distortion_left = cv2.calibrateCamera(
left_obj, left_points, imageSize, None, None)[1:3]
matrix_right, distortion_right = cv2.calibrateCamera(
left_obj, right_points, imageSize, None, None)[1:3]
Calibrates a stereo camera set up
The cv2.stereoCalibrate function estimates the transformation between two cameras making a stereo pair.
As a result, we get the external parameters of the right camera in the left system. We are only interested in translation and rotation matrices, so I use the list slicing [5:7].
rotation_matrix, translation_matrix = cv2.stereoCalibrate(
left_obj, left_points, right_points,
matrix_left, distortion_left,
matrix_right, distortion_right,
self.imageSize, flags=cv2.CALIB_FIX_INTRINSIC, criteria=self.term)[5:7]
Computes rectification transforms
Computes rectification transforms (cv2.stereoRectify) for each head of a calibrated stereo camera.
rect_left, rect_right, \
proj_left, proj_right, \
dispartity, \
ROI_left, ROI_right = cv2.stereoRectify(
matrix_left, distortion_left,
matrix_right, distortion_right,
imageSize, rot_matrix, trans_vector,
flags=cv2.CALIB_ZERO_DISPARITY, alpha=-1)
Results
- rotation matrix
[ [ 0.999970, 0.000521, 0.007599], [-0.000438, 0.999940, -0.010859], [-0.007604, 0.010855, 0.999912] ] - translation matrix
[ [-0.069396, -6.556753, -0.000429] ]We can calculate the Euclidean distance between cameras. The left camera is at the point (0,0,0), so the calculations are simplified and we get the result:
6.557120. - dispartity matrix
[ [1.0, 0.0, 0.0, -528.562538], [0.0, 1.0, 0.0, -435.739891], [0.0, 0.0, 0.0, 1310.538592], [0.0, 0.0, 0.0, 14.409730], ]
Full code
All the code, fragments of which have been discussed, can be found at this link. This is the 2nd article from the 3-part project.
Leave a comment