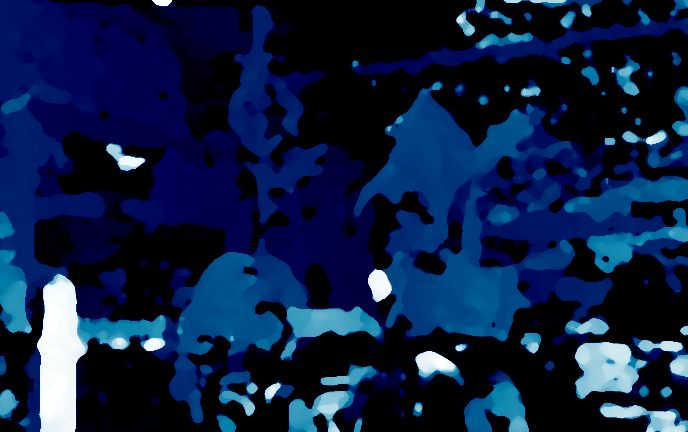
Depther project - part 3: remapping and stereo image
This article shows how to use calculated camera distortions and transformations between them to compensate for distortions with cv2.remap and calculate the d...
This article shows how to use calculated camera distortions and transformations between them to compensate for distortions with cv2.remap and calculate the d...
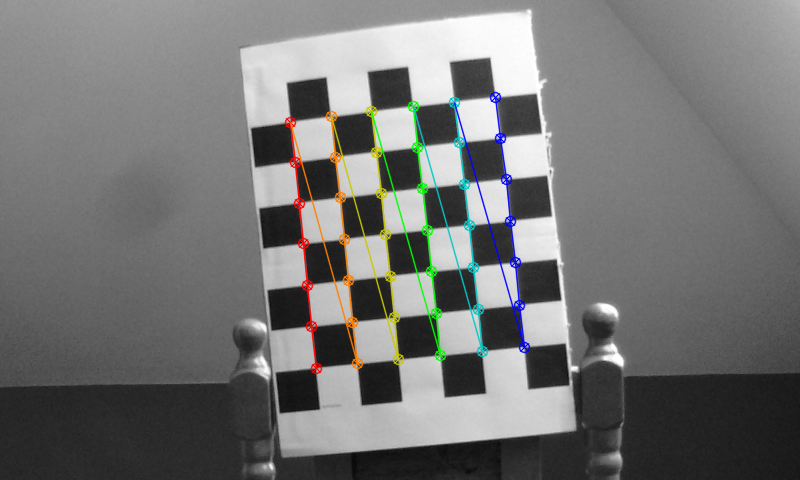
This article shows how to perform dual camera calibration using cv2.calibrateCamera when we have data collected. Next, we discuss how to calibrate cameras wi...
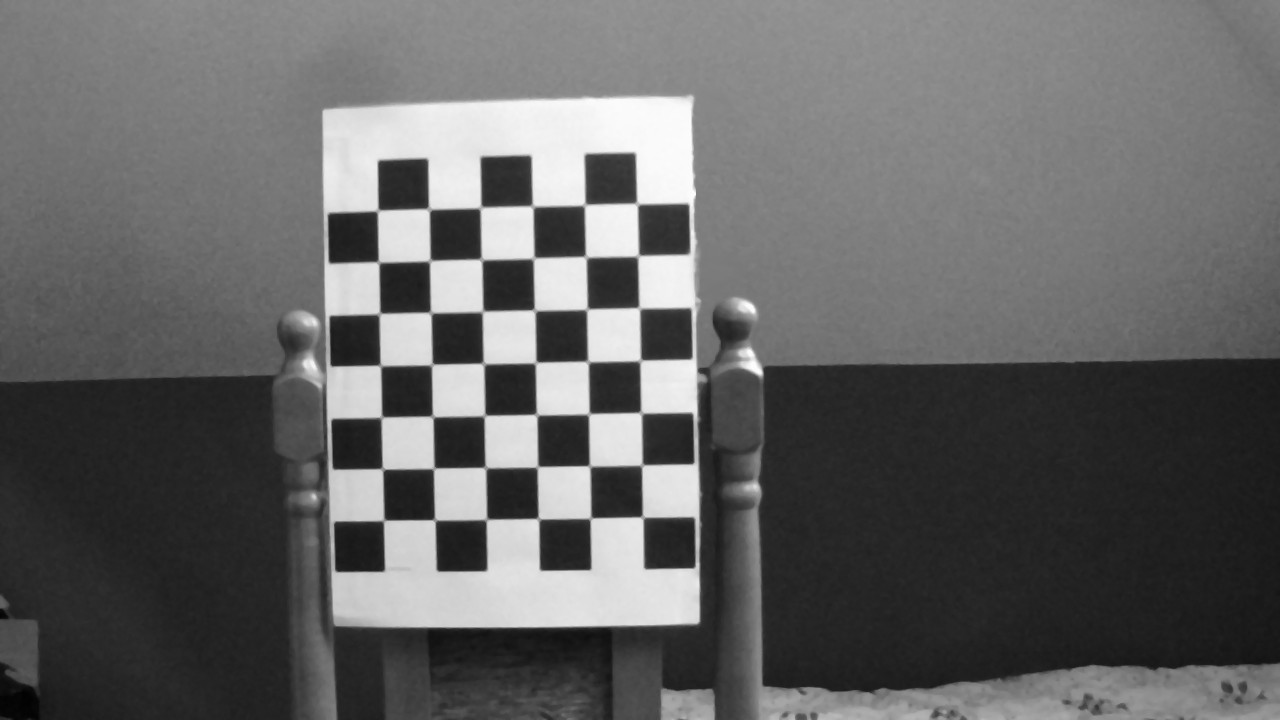
This post is an introduction to the task of OpenCV camera calibration and creating a deep image from a stereo vision camera. The first topic is to get the ri...
This article shows how to use calculated camera distortions and transformations between them to compensate for distortions with cv2.remap and calculate the d...
This article shows how to perform dual camera calibration using cv2.calibrateCamera when we have data collected. Next, we discuss how to calibrate cameras wi...
This post is an introduction to the task of OpenCV camera calibration and creating a deep image from a stereo vision camera. The first topic is to get the ri...
This article shows how to use calculated camera distortions and transformations between them to compensate for distortions with cv2.remap and calculate the d...
This article shows how to perform dual camera calibration using cv2.calibrateCamera when we have data collected. Next, we discuss how to calibrate cameras wi...
This post is an introduction to the task of OpenCV camera calibration and creating a deep image from a stereo vision camera. The first topic is to get the ri...
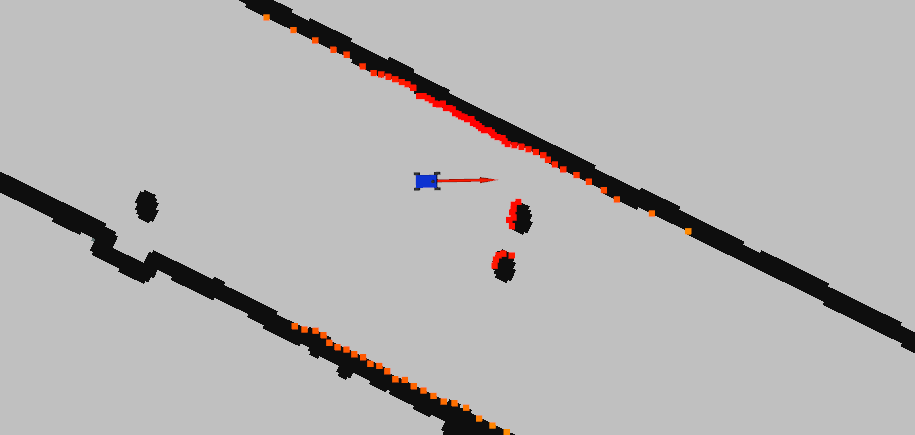
Rviz allow to subscribe and show ROS topics. It is the simplest form of visualization messages like OccupancyGrid or LaserScan. Every time when you use ROS a...

Services allow you to create a request/response paradigm. How to make your own Service in ROS Melodic using Python, create your own Service message type and ...
Simple introduction to Zephyr PWM control with servo example.
Simple introduction to Zephyr PWM control with servo example.
Simple introduction to Zephyr PWM control with servo example.
Simple introduction to Zephyr PWM control with servo example.
Simple introduction to Zephyr PWM control with servo example.

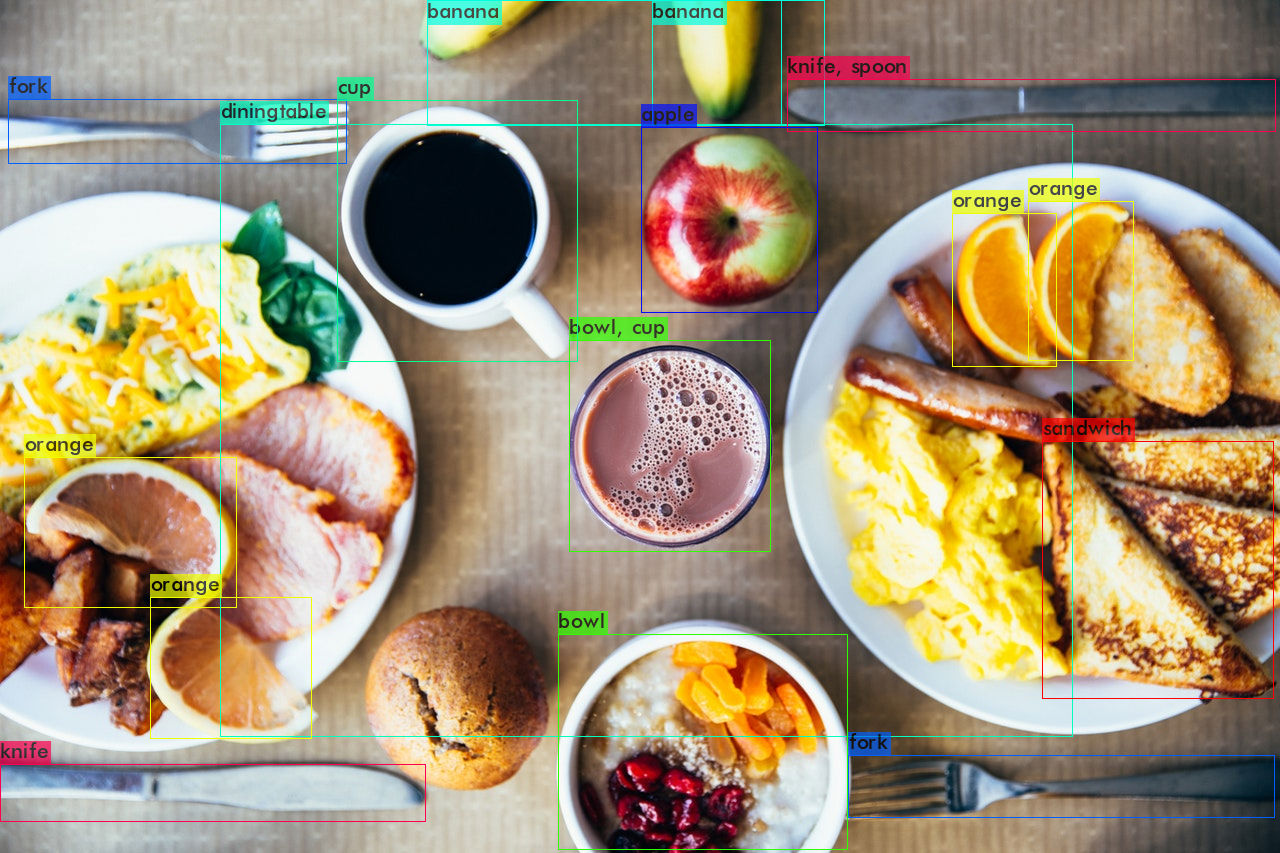
Many state-of-the-art algorithms for object detection are trained evaluated on a COCO dataset set. In this article I show you how to adapt your collection to...
Many state-of-the-art algorithms for object detection are trained evaluated on a COCO dataset set. In this article I show you how to adapt your collection to...
Services allow you to create a request/response paradigm. How to make your own Service in ROS Melodic using Python, create your own Service message type and ...
Services allow you to create a request/response paradigm. How to make your own Service in ROS Melodic using Python, create your own Service message type and ...
Rviz allow to subscribe and show ROS topics. It is the simplest form of visualization messages like OccupancyGrid or LaserScan. Every time when you use ROS a...
[UPDATE] How does YOLOv4 work on NVIDIA Jetson TX2? We compare with YOLOv3-tyny and YOLOv4-tiny to choose an effective and fast fast object detection system.
[UPDATE] How does YOLOv4 work on NVIDIA Jetson TX2? We compare with YOLOv3-tyny and YOLOv4-tiny to choose an effective and fast fast object detection system.
[UPDATE] How does YOLOv4 work on NVIDIA Jetson TX2? We compare with YOLOv3-tyny and YOLOv4-tiny to choose an effective and fast fast object detection system.
[UPDATE] How does YOLOv4 work on NVIDIA Jetson TX2? We compare with YOLOv3-tyny and YOLOv4-tiny to choose an effective and fast fast object detection system.
[UPDATE] How does YOLOv4 work on NVIDIA Jetson TX2? We compare with YOLOv3-tyny and YOLOv4-tiny to choose an effective and fast fast object detection system.
[UPDATE] How does YOLOv4 work on NVIDIA Jetson TX2? We compare with YOLOv3-tyny and YOLOv4-tiny to choose an effective and fast fast object detection system.
[UPDATE] How does YOLOv4 work on NVIDIA Jetson TX2? We compare with YOLOv3-tyny and YOLOv4-tiny to choose an effective and fast fast object detection system.
[UPDATE] How does YOLOv4 work on NVIDIA Jetson TX2? We compare with YOLOv3-tyny and YOLOv4-tiny to choose an effective and fast fast object detection system.